General structure of the system
The structure of the control system is dependent on tasks realized by robot. However, some parts are common for different tasks. Two common agents can be distinguished in the control system:
- core/a - embodied agent, the robot hardware and its low-level controller,
- ros_interface/a - computational agent; ROS interface for core/a.
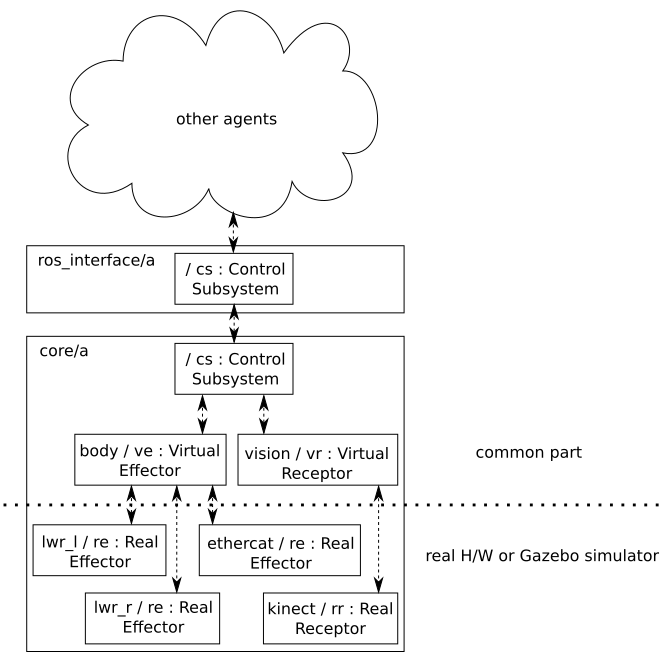
Realization of a task require another agents to be included into the system. They can communicate with velma_ros_interface using ROS communication methods (i.e. topics, actions and services). Direct, bidirectional communication with velma_core agent must be avoided, however it is possible to exchange velma_ros_interface with another agent that can serve as interface between velma_core and computational agents.
Deeper look into the system
The agent core/a consists of three abstraction levels. These levels correspond to types of subsystems of an embodied agent distinguished in the Specification Method:
- control subsystem,
- virtual effectors and receptors,
- real effectors and receptors.
In core/a agent, each level contains at least one subsystem. Additionally, each subsystem is implemented as a separate process in operating system, using FABRIC. Such distributed structure has some advantages:
- subsystems can be easily replaced, if the replacements have the same communication buffers; in particular, hardware-operating subsystems can be replaced with simulation subsystem, thus both real-hardware and simulated systems share utmost part
- critical error in one subsystem does not affect other subsystems, so they can react adequately to keep proper operation of the system
- lower subsystems in the hierarchy are simpler and thus more error proof, they can react immediately to errors in upper subsystems
Subsystems implementation related to specification:
| subsystem name | implementation (HW) | implementation (sim) |
|---|---|---|
| ros_interface/a./cs | velma_task_cs_ros_interface | velma_task_cs_ros_interface |
| core/a./cs | velma_core_cs | velma_core_cs |
| core/a.body/ve | velma_core_ve_body | velma_core_ve_body |
| core/a.lwr_l/re | velma_core_re_lwr_l | velma_sim_gazebo |
| core/a.lwr_r/re | velma_core_re_lwr_r | velma_sim_gazebo |
| core/a.ethercat/re | velma_ec_driver | velma_sim_gazebo |
| core/a.kinect/vr | kinect_hw | velma_sim_gazebo |
| core/a.kinect/rr | velma_sim_gazebo |
HW system
The only difference between simulated and HW system is in the lowest level of abstraction. Subsystems that communicate with hardware are exchangeable with one subsystem that simulates the whole robot. So basically, in the simulated system, the simulator (Gazebo) runs in the process of velma_sim_gazebo subsystem, while in the real-hardware system velma_ec_driver, velma_core_re_lwr_r and velma_core_re_lwr_l communicate with hardware devices of robot.
Basics of operation
Real-time (RT) control loop is implemented in velma_core agent. In each iteration of the control loop the following sequence is executed:
- velma_core_ve_body reads status from real effectors/receptors (i.e. velma_sim_gazebo in simulated system or velma_ec_driver, velma_core_re_lwr_r and velma_core_re_lwr_l in HW system) and sends it immediately to control subsystem velma_core_cs,
- the control subsystem velma_core_cs reads commands from task agent velma_ros_interface and closes the control loop by calculating desired control, and sends it back to virtual effector velma_core_ve_body,
- the virtual effector velma_core_ve_body is executed second time in the current iteration, but this time it does not read new status from real effectors/receptors; instead, it reads commands from velma_core_cs,
- then, velma_core_ve_body verifies the last read status of real effectors/receptors and the current commands from velma_core_cs, process them and sends commands to real effectors.
velma_core_cs
The most computation in the RT control loop is done in velma_core_cs. This subsystem realizes complex operations, such as:
- trajectory generation,
- control law implementation (i.e. computation of low-level controls),
- collision checking.
It implements most of high-level behaviors, i.e.:
- cart_imp - impedance control in the joint space,
- jnt_imp - impedance control in the operational space,
- relax - self collision repulsive behavior,
- safe - safe behavior: impedance control in joint space with very low stiffness and high damping,
- idle - do nothing and wait until virtual effector exits safe state.
Those behaviors involve control of whole body and takes into account dependencies between links and joints of the robot. Each of these behaviors is realized in exactly one state of Finite State Machine (FSM) of the subsystem. The behaviors and FSM is described in more detail in next section.
velma_core_ve_body
Virtual effector velma_core_ve_body has much simpler functionality. It does not take into account all dependencies between parts of the robot, but it controls single joints separately. It basically realizes two main modes of operation:
- transparent - i.e. pass status from real effectors to control subsystem and pass commands in the opposite direction,
- safe - apply high damping for each joint separately; when virtual effector is in this state, the control subsystem is in idle state.
Those two modes of operation should not be confused with behaviors of the virtual effector defined using the specification method. They are realized by five behaviors in five states of the FSM, described in next section.