This section contains information about various tools for visualization of Velma control system and state of simulation.
Control system state and structure
Command
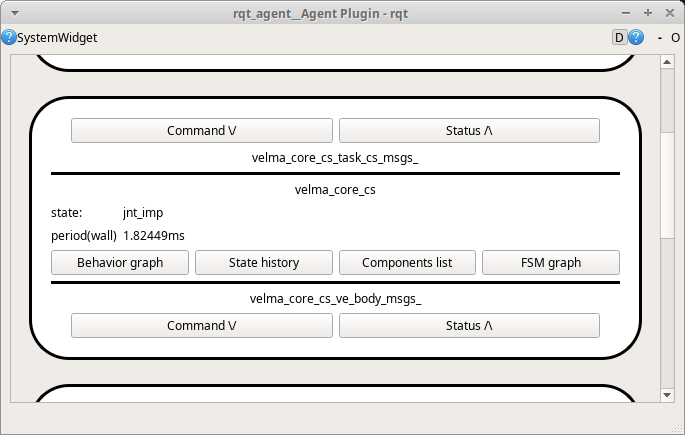
rosrun rqt_agent fabric_control_panel.py
Description fabric_control_panel.py is a GUI tool that shows structure and state of low-level subsystems of the control system. It can be use to examine, for each subsystem:
- structure of FSM (button FSM graph),
- the current state of FSM and behaviour,
- period,
- history of state switches of FSM (button State history),
- state of Orocos components (button Components list),
- data flow diagram of Orocos components (button Behavior graph).
This script works with a running control system only.
Control panel for Velma robot
Command
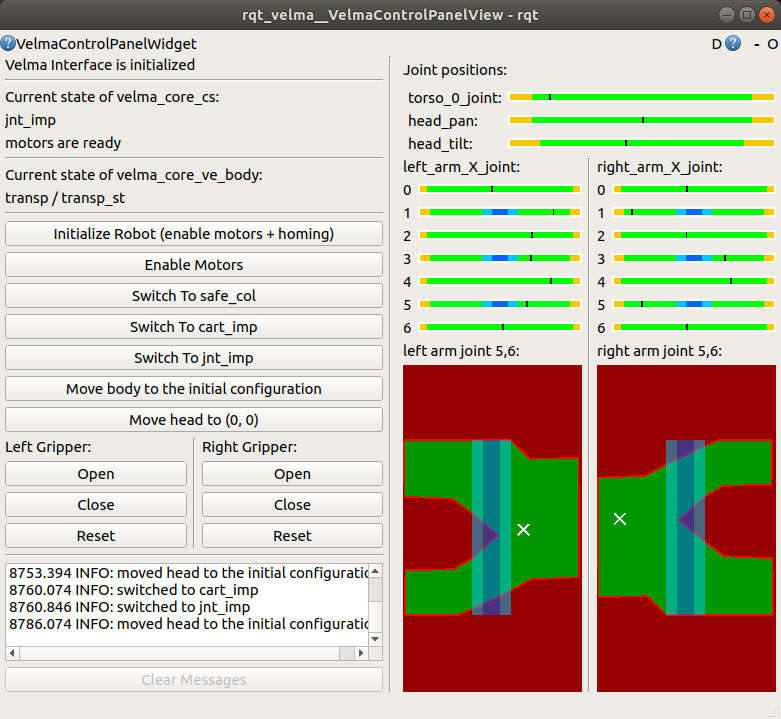
rosrun rqt_velma velma_control_panel.py
Description velma_control_panel.py is a GUI tool that shows state of Velma robot and allows execution of some simple commands:
- initialize robot
- enable motors
- switch to one of normalOperation substates: cartesianImpedance, jointImpedance, relax
- move to the initial configuration (without planning, so be careful!)
- reset, open or close grippers
The state shown is:
- state of core/a./cs subsystem
- state of motors
- state of core/a.body/ve subsystem
- position of all joints of head, torso and arms
- 2-D visualization of position of two last joints of each manipulator
Each joint position is shown with its position constraints.
This script works with a running control system only.
Internal collisions
Command
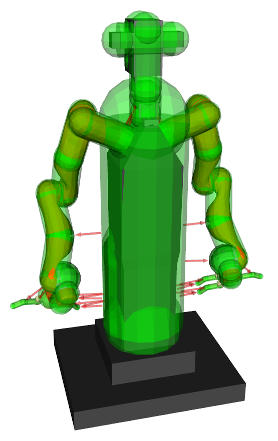
roslaunch velma_common show_collisions.launch
Description
It publishes visual markers that visualize collision geometries and internal collisions.
The markers can be visualized in ROS rviz using topic /self_collisions.
The green shapes are collision geometries and red arrows denote closeness of links.
Also, the script outputs to the terminal names of pairs of close links and their distance.
This script works with a running control system only.
The launch file show_collisions.launch in package velma_common
executes a script show_collisions in package common_core_cs_components
Camera frustum
Command
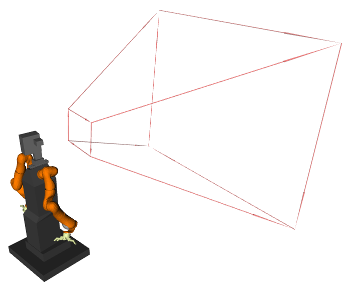
roslaunch velma_common show_kinect_frustum.launch
Description
It publishes visual markers that visualize camera frustum of Kinect mounted on head of Velma.
The markers can be visualized in ROS rviz using topic /camera_frustum.
This script works with both a running control system and urdf description test.
The launch file show_kinect_frustum.launch in package velma_common
executes a script publish_camera_frustum.py in package rcprg_ros_utils
Joints position and range
Command
roslaunch velma_common show_joints.launch
Description
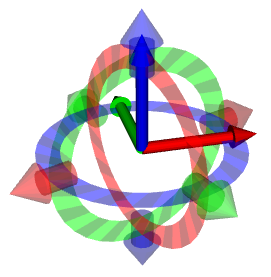
It publishes visual markers that visualize position and range of joints of Velma.
The markers can be visualized in ROS rviz using topic /joints_vis.
Each red arrow represent axis of joint, blue arrow represent position of joint in range shown as a green plate.
This script works with both a running control system and urdf description test.

The launch file show_joints.launch in package velma_common
executes a script publish_joints_visualization.py in package rcprg_ros_utils
Range of the end effectors
Command
roslaunch velma_common show_reachability_range.launch
Description
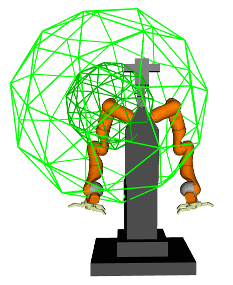
It publishes visual markers that visualize range (i.e. reachable space) of the end effectors of Velma.
The markers can be visualized in ROS rviz using topic /reachability_range.
Range of one end effector is visualized approximately as two coaxial spheres. The end effector can move in space between the spheres.
Ranges of the right and left end effectors are visualized in green and red colors respectively.
Please note that near the boundary of the reachable space (i.e. close to either inner or outer sphere), the motion of end effector can be restricted and some orientations cannot be reached.
This script works with both a running control system and urdf description test.
The launch file show_reachability_range.launch in package velma_common
executes a script reachability_range.py in package rcprg_ros_utils
Pose of a frame
Example command
roslaunch rcprg_ros_utils pose_int_marker.launch frame_id:=example_frame
Description This tool creates an interactive marker in ROS rviz with 6 DOF. It can be moved in rviz and its pose (i.e. position and orientation) is printed in the terminal.
The launch file: pose_int_marker.launch in package rcprg_ros_utils executes
a script pose_int_marker.py in package rcprg_ros_utils
Pose of an object in Gazebo simulation
Example command
roslaunch rcprg_gazebo_utils gazebo_publish_ros_tf_object.launch link_name:="velma::right_HandFingerOneKnuckleTwoLink" frame_id:=frame_01
Description
It publishes ROS tf (i.e. transform on /tf topic) of an object in Gazebo simulation. The launch file has two obligatory arguments:
- link_name is the name of the object in simulation, e.g. if we want to publish pose of link link_1 of model robot_1, the link name is robot_1::link_1,
- frame_id is the unique name of the frame we want to publish to.
The launch file gazebo_publish_ros_tf_object.launch in package rcprg_gazebo_utils
executes a script gazebo_publish_ros_tf_object in package rcprg_gazebo_utils
Interactive visualization of kinematics
Command
roslaunch velma_description description_test.launch
Description
This launch file should be executed when the system is NOT running. This tool is NOT related to the control system, but it can be used to verify kinematics of the robot. It provides a control panel with slides that can move single joints of Velma.