This section contains information about various tools for task execution.
Visual markers tracking
Command
roslaunch velma_common ar_track_kinect_50.launch
Description
This launch file creates a ROS node that recognizes and tracks visual markers in camera image.
Running online octomap server
Command
roslaunch velma_common octomap_server.launch
Description
This launchfile runs octomap node, which gathers information about occupancy of environment. Also, unknown (unexplored) space can be obtained.
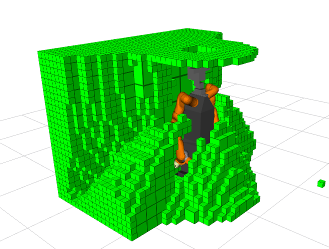
Example of octomap of known, occupied space - floor is visible (ROS topic: /occupied_cells_vis_array):

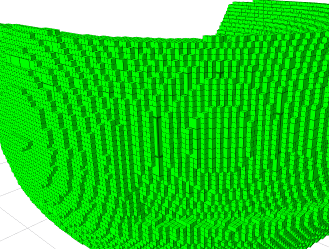
Example of octomap of unknown space (ROS topic: /unknown_cells_vis_array):
Example of octomap of known, free space (ROS topic: /free_cells_vis_array):
Example of merged octomap, i.e. sum of occupied space and unknown space (ROS topic: /merged_cells_vis_array):
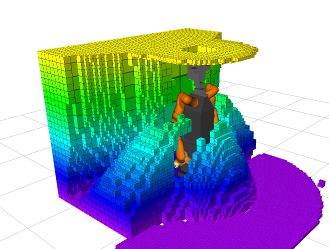 Planner uses the merged octomap to generate trajectories that avoid both occupied and unknown space.
Planner uses the merged octomap to generate trajectories that avoid both occupied and unknown space.
Running offline octomap server
Command
roslaunch velma_common octomap_offline_server.launch
Description
This launch file runs octomap server that uses saved octomap. The octomap in offline server cannot be updated with new observations.
Moving the end effectors using interactive markers
Command
rosrun velma_common int_markers_cimp.py
Description
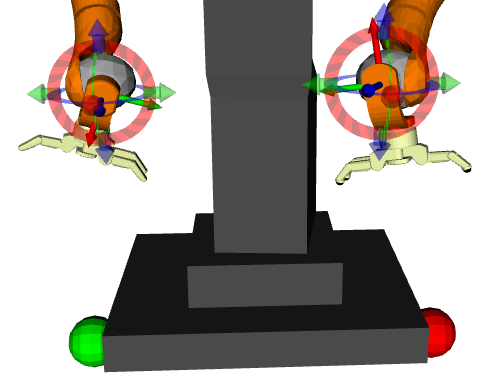
This script publishes interactive 6 DOF markers that can be used inside rviz to move around the end effectors of Velma. ROS topics for interactive markers are:
- for the right end effector:
/int_markers_cimp_right/update - for the left end effector:
/int_markers_cimp_left/update
Moving the whole body using interactive markers
Command
rosrun velma_common int_markers_jimp.py
Description
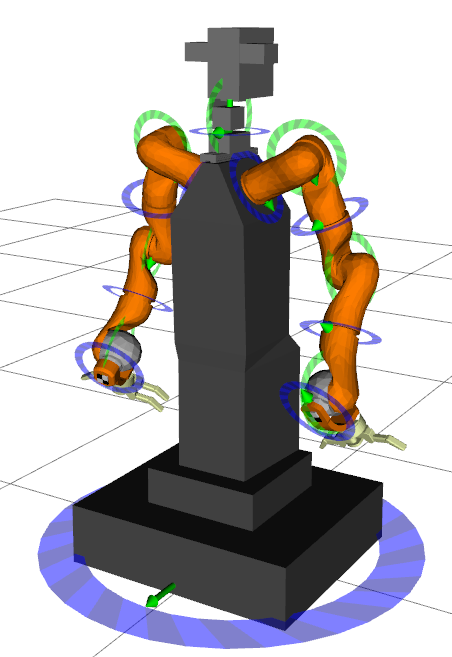
This script publishes interactive 1 DOF markers that can be used inside rviz to move joints of Velma.
ROS topic for this interactive marker is /int_markers_jimp/update
Moving an object in Gazebo using interactive 6 DOF marker
Example command
rosrun rcprg_gazebo_utils gazebo_move_object.py jar_01::link
Description
This script publishes interactive 6 DOF marker that can be used in rviz to move a specified object in Gazebo. Please note that motion of the object should not be constrained by any kinematics bonds, i.e. it should be a free-floating object.
Running tests for inverse kinematics (IK)
This test can be run only if the system is shut down.
Command
Run the following commands in seperate terminals:
roscore
roslaunch velma_description upload_robot.launch
rosrun robot_state_publisher robot_state_publisher
rosrun rviz rviz
(in rviz, set Fixed Frame to “world”, and add RobotModel visualization)
rosrun velma_kinematics test_velma_ik_geom.py
(in rviz, add visualization for topic /velma_ik_geom)
Description
This script (test_velma_ik_geom.py) runs test for inverse kinematics implemented in class KinematicsSolverVelma in file velma_system/velma_kinematics/src/velma_kinematics/velma_ik_geom.py and visualizes the effects in rviz.